

Introduction
Methodology
Excavation
Material Point Method (MPM)
Governing Equation
Result and Discussions
Conclusions
Introduction
All construction projects necessitate the use of earthwork. Earthwork activity is known to account for around 30% of construction projects in terms of cost [1]. Given the importance of earthwork, it must be completed efficiently in order to lower the project’s overall construction cost and duration. Furthermore, effective earthworks operations are necessary to reduce fossil fuel consumption and construction equipment maintenance costs, which is especially important given the issue of carbon emissions. Earthwork necessitates a lot of earth hauling, therefore construction equipment is used for practically all of it. Excavators are a significant part of this group. Excavators are multi-purpose equipment that may do trench excavation, earthmoving using dump trucks, and other tasks like moving materials, crushing weathered rocks, and grading.
Because excavators perform a repeated task (e.g., digging-hauling-loading), there have been numerous attempts to automate them [2]. For instance, IES (Intelligent Excavating System) has been investigated and developed a fully autonomous excavator that can not only excavate but load dirt onto a truck [3]. The unmanned excavator developed by the IES is a system that can perform driving, tracking, situation awareness (e.g., collision avoidance, truck detection, etc.) excavation, loading, quality control, and progress management without any user intervention. To automatically excavate with excavators, several key strategies are required. First and foremost, task planning abilities are required. The earthwork can only be completed after selecting where to begin working on a given earthwork region and in what sequence to excavate. Figure 1 shows an excavation region when an excavator is working. Studies related to the planning of work related to excavation work mainly include those related to earthwork allocation performed at the global level and those related to the movement of construction equipment by section.

Furthermore, research has been proposed to develop algorithms to determine the excavation sequence of construction equipment within specific zones, planning coverage paths for generating movement paths of construction equipment, and a methodology for calculating minimum cost paths based on the movement cost. While most studies focus on efficient movement of construction equipment, there have been several studies on the interaction between soil and excavator buckets during the actual soil excavation. For example, soil-tool interaction studies have been conducted for digging automation [4, 5, 6].
To forecast soil reaction force, many empirical formulations have been established. These formulations have the disadvantage of being restricted to a given tool shape and experimental soil conditions. Analytical approaches based on passive earth pressure have also been used to predict soil reaction forces. For instance, a study established one of the first empirical equations to determine the draft force of model moldboard plows in the soil. Besides, a new way of analyzing soil interaction was also proposed. The Finite Element Method (FEM) is a numerical method for analyzing complicated engineering problems, such as those that involve geometric and material nonlinearities. The Discrete Element Method (DEM), which, unlike FEM, views the granular material as discrete individual particles, is another commonly used numerical method for simulating soil and other granular materials. They utilized a triaxial test to calibrate the system and an experimental test to validate it, in which a single vertical blade was driven at a constant velocity through two types of material (steel balls and round gravel) [7, 8, 9].
Therefore, this study aims to investigate soil-bucket interactions for excavator, which can aid in the efficient operation of excavators and the development of automation technologies. To this end, Material Point Method (MPM) was applied to implement the behavior of soil in a realistic manner. In this work, the interaction between soil and buckets are simulated in a two-dimensional space, utilizing an MPM simulation program developed based on the game engine called Unity [10]. When excavating using excavators, the method of identifying the Lamé parameters that best illustrate soil deformation was applied to the study. Total 15 combinations of parameters were tested using a game engine. MPM applied the Neo-Hookean model, and the verification considering the characteristics of soil was excluded from the scope of this study due to the wide variety of soil classification criteria and types.
Methodology
Excavation
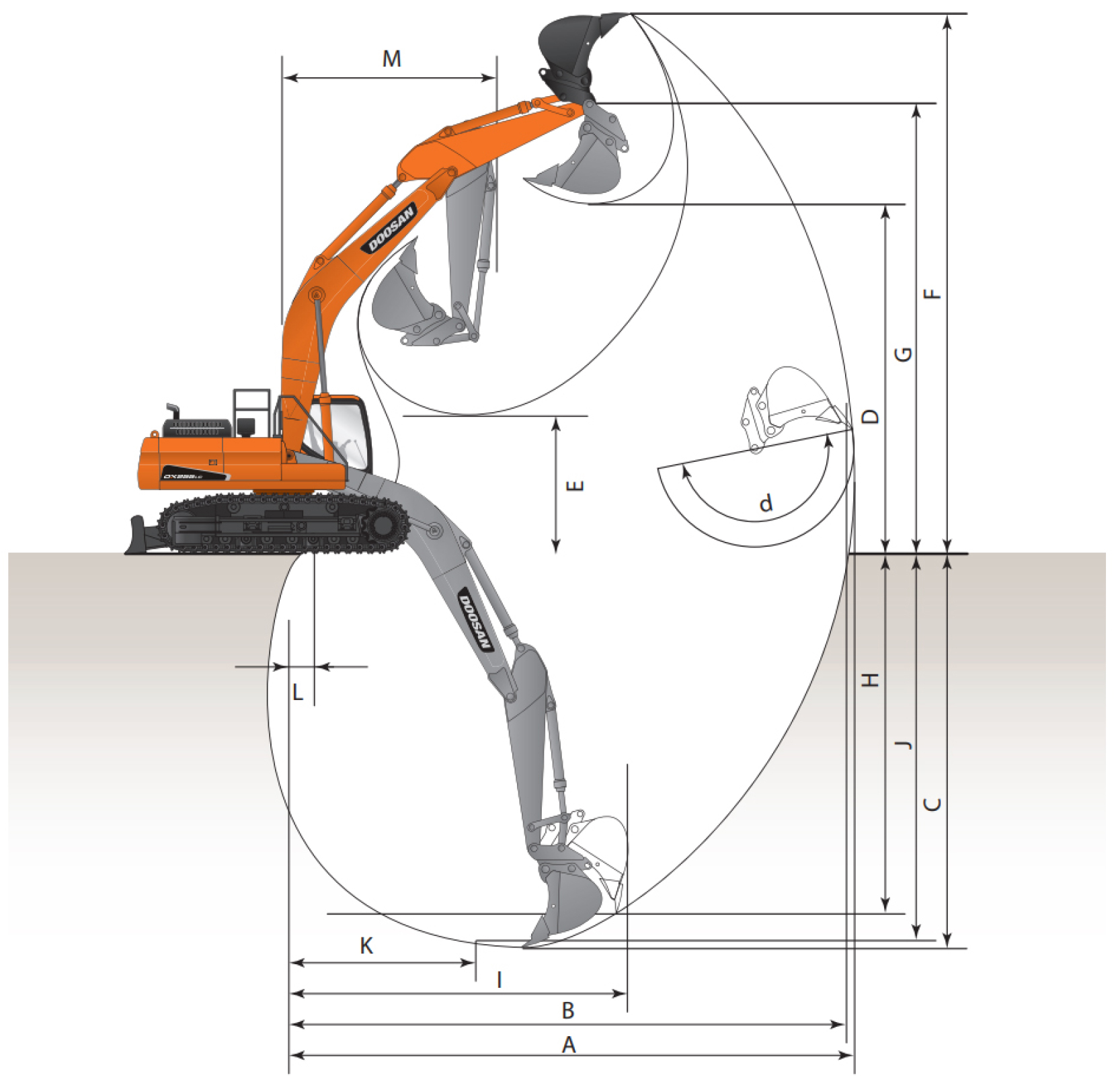
Excavation with excavators is usually done in tandem with dump trucks. Scrappers and bulldozers are utilized for short-distance soil movements, however if construction sites or external dirt require long-distance transportation, an excavator and dump truck combination is required. Excavators and dump trucks work together in a condition that is slightly higher than dump trucks. This is because not only can soil be evenly placed in the loading box, but it also improves worker safety and convenience. Excavators are primarily determined by the operator’s empirical judgment before excavation. In principle, soil conditions should be classified into Type A, B, and C 3 based on soil engineers’ judgment before excavation [11], and the depth or area of excavation should be different depending on soil strength, but most small sites are often inaccurate even if this information does not exist. In other words, the majority of the task is reliant on the equipment manipulator’s experience. In order to excavate the dirt, an excavator has a broader operating range in the lower area, as shown in Figure 2.
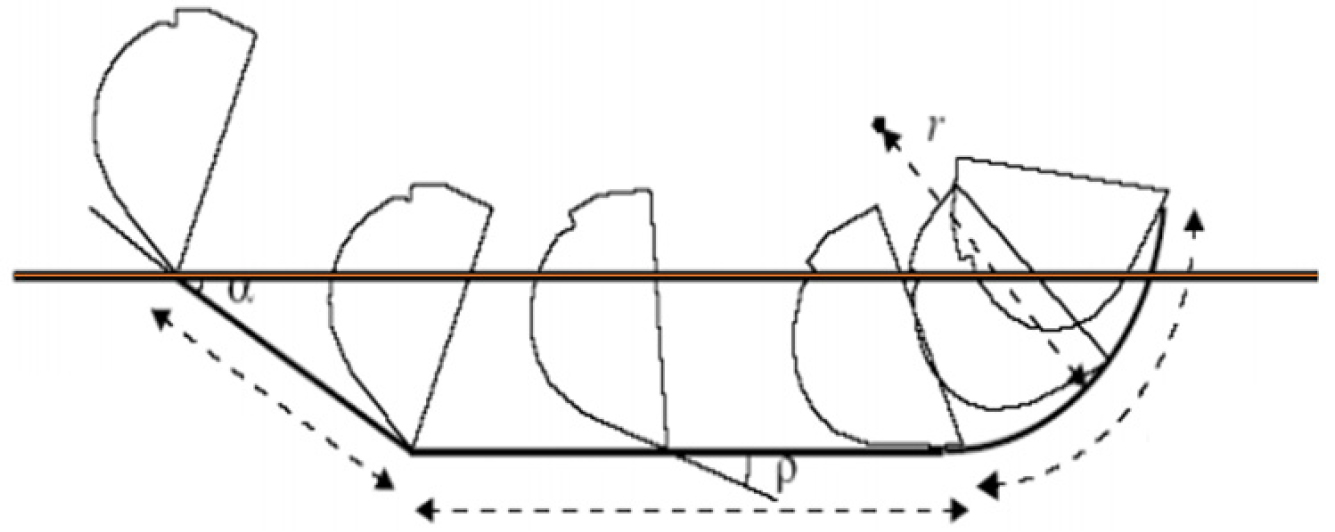
Excavators normally differentiate themselves by penetrating and scraping the target region, as shown in Figure 3. The excavator works by scratching the bucket up in the inner direction until it has penetrated the earth sufficiently to contain enough soil in the bucket. As a result, work output is determined by the angle and strength of the bucket as it digs into the dirt, the length and depth of the scratch-up motion, and the final lift-up motion. Previous studies have been carried out to determine the impact of various parameters on soil-tool interaction, prediction of digging trajectory and excavation pressures, and robust backhoe mechanism design.
Material Point Method (MPM)
MPM is a numerical technique for simulating the behavior of continuous materials like solids, liquids, and gases. MPM is a Lagrangian-Eulerian hybrid approach that excels in simulating a wide variety of physical processes. MPM was first developed as a FLIP modification to help with computational solid dynamics challenges. It generalizes the PIC / FLIP simulation framework to almost anything you can describe with a constitutive equation. The Lagrangian technique, which examines particle behavior and quality standards, is widely utilized, and an Eulerian-based hybrid MPM has recently appeared and gained popularity.
To simulate using MLS-MPM, the Unity game engine was used in this study. Unity is a cross-platform game engine developed by Unity Technologies [12]. It was first unveiled and distributed as a Mac OS X-exclusive game engine in June 2005 at Apple Inc.’s Worldwide Developers Conference. Since then, the engine has been continuously expanded to accommodate a wide range of platforms, including PC, mobile, console, and virtual reality. This study examined the feasibility of implementing an excavation simulation environment using MLS-MPM (Moving Least Square-MPM). The MLS-MPM method has the advantage of being relatively simple to implement because it estimates the flow of particles in continuous volume based on the grid compared to the standard MPM method [13, 14].
Governing Equation
The conservation of linear momentum and a material model are used to model the deformation of a continuum. MPM may be used with a wide range of material models that employ either the rate of deformation (i.e. the symmetric part of the velocity gradient) or the deformation gradient. However, for the purposes of this investigation, the simple linear-elastic and neo-Hookean models based on the deformation gradient would suffice. Lamé parameters (also known as Lamé coefficients, Lamé constants, or Lamé moduli) are two material-dependent quantities that occur in strain-stress interactions and are denoted by and in continuum mechanics. In general, the first and second parameters of Lamé’s equation are referred to as Lamé’s first and second parameters, respectively. Depending on the context, other names for one or both arguments may be used. For example, in fluid dynamics, the parameter is called the dynamic viscosity of a fluid, whereas in elasticity, it is called the shear modulus, and is sometimes indicated by G instead of μ. Typically, the notation G is used in conjunction with the letter t. The two parameters form a parameterization of the elastic moduli for homogeneous isotropic media, which is widely used in mathematical literature, and are thus connected to the other elastic moduli. Although the shear modulus, must be positive, the Lamé’s first parameter, can be negative in theory; yet, it is usually positive for most materials.
Result and Discussions
As previously stated, two-dimensional MPM simulations were performed in this work using game engines. This simulation was run on a normal PC configuration, and the simulation time was relatively brief. Simulation results can be viewed significantly faster in Burst mode, and depending on the version of Unity, Burst mode may or may not be used. The findings simulated variations in excavation features due to differences in Lambda and gamma values, as well as analyzing how well the MPM approach replicates soil deformation by examining the shape of dirt as the bucket enters and is scooped.
This study investigated how comparable the results of the excavation simulations were to reality by adjusting Lene’ settings. Lambda examined a total of 15 permutations with values of 10, 30, and Gamma spaced 2 from 1 to 9. The simulation was carried out in Unity by modifying variables directly from the source code, freeing the clumped particles through initial adhesion, and then implementing both excavation and lift motions via user input. Tables 1, 2, and 3 show the results of obtaining two deliverables under a total of 15 situations.
Table 1.
soil-bucket 2D simulation (Lene’ parameters: λ=10)
| Lene’ parameters | Penetration | Scoop | |
| 𝜆=10 | 𝜇=1 |  | 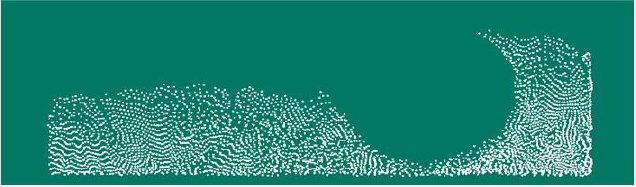 |
| 𝜇=3 |  | 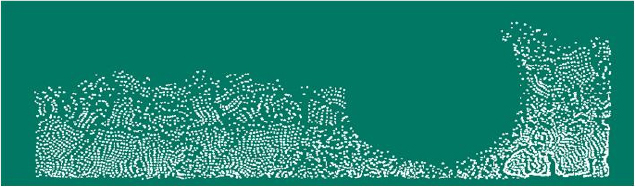 | |
| 𝜇=5 | 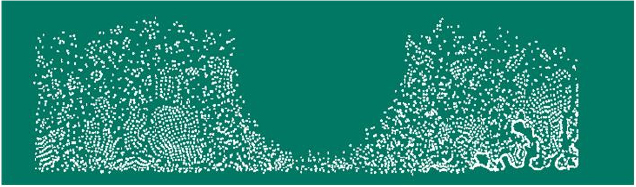 |  | |
| 𝜇=7 |  |  | |
| 𝜇=9 | 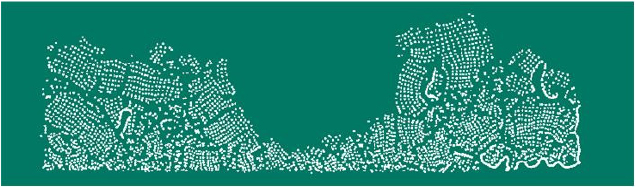 | 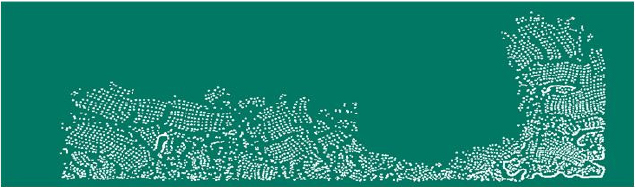 | |
Table 2.
soil-bucket 2D simulation (Lene’ parameters: λ=30)
| Lene’ parameters | Penetration | Scoop | |
| 𝜆=30 | 𝜇=1 |  | 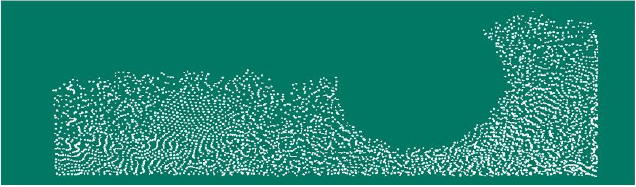 |
| 𝜇=3 | 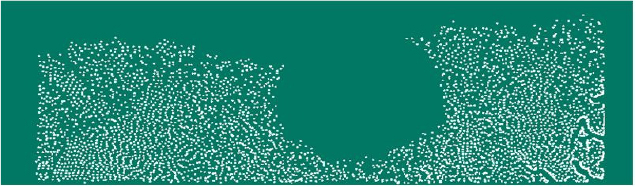 | 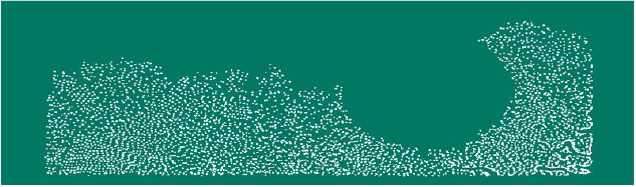 | |
| 𝜇=5 | 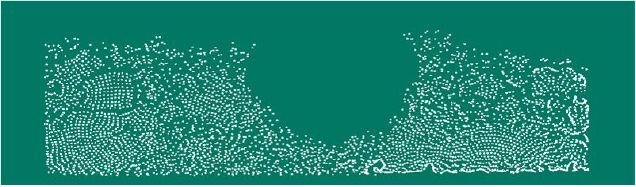 |  | |
| 𝜇=7 |  | 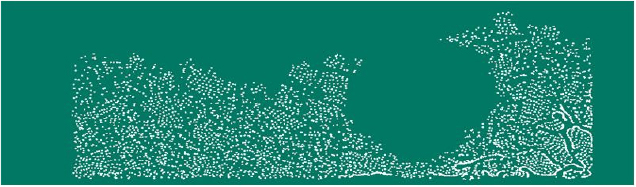 | |
| 𝜇=9 |  | 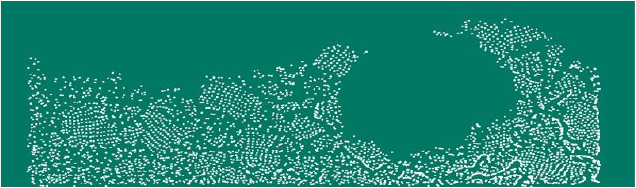 | |
Table 3.
soil-bucket 2D simulation (Lene’ parameters: λ=50)
| Lene’ parameters | Penetration | Scoop | |
| 𝜆=50 | 𝜇=1 | 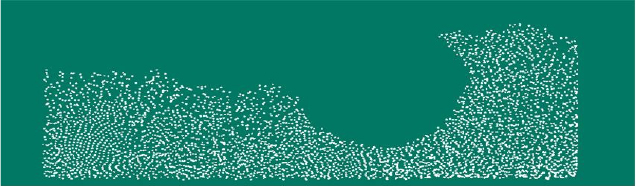 | 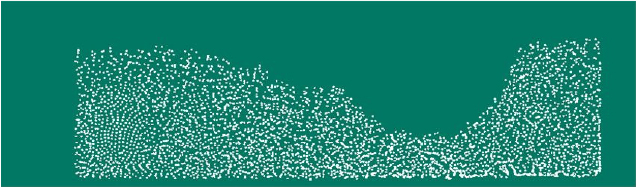 |
| 𝜇=3 | 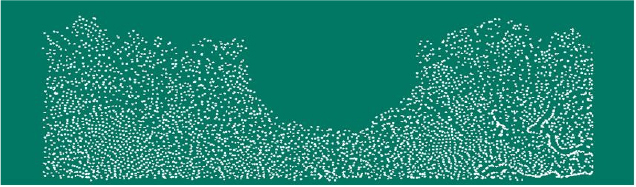 | 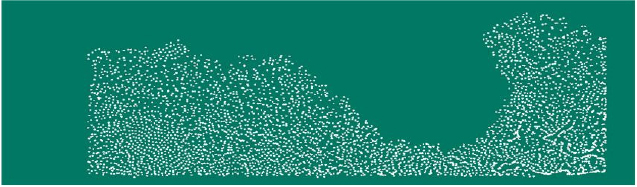 | |
| 𝜇=5 | 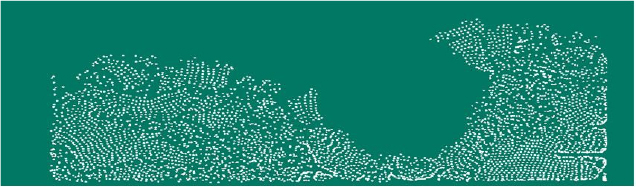 | 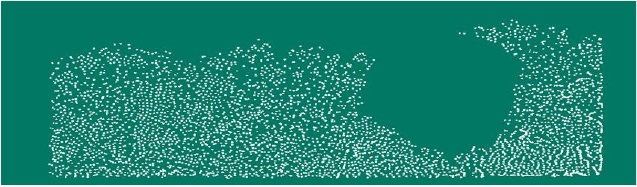 | |
| 𝜇=7 | 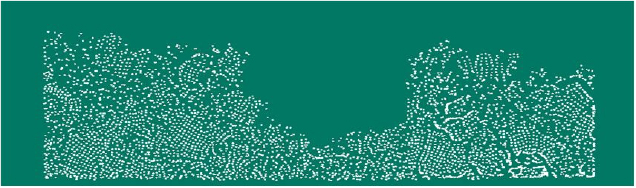 | 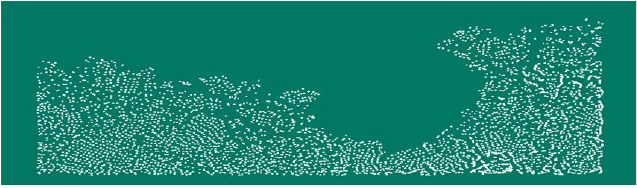 | |
| 𝜇=9 | 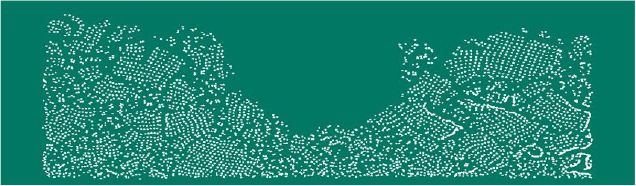 | 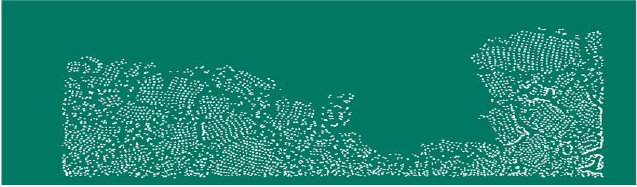 | |
The deformation of the soil looked to be similar in most cases. In Table 3, when comparing values 1 and 9, the more distinct the particle tends to clump together in 9. The MPM approach, which is based on the coefficient of adhesion and friction of soil, performs a similar analysis to that of soil dynamics. The difference in propensity that occurs when λ grows, on the other hand, is seen to be ambiguous. When the μ values in Tables 1, 2, and 3 were compared under the same conditions, some differences in soil behavior were discovered in the intervals where the shape of the fracture plane appears, but the shape of the fracture plane was not noticeable due to the limitations of the behavior in this simulation. The difference was that when the particle first became loose, there was a significant difference in the degree of loosening. This can be observed in Table 4, which shows that when the overall volume of soil is big, it tends to rise. As a result, the λ can be modified to show the behavior of soil in an environment where the volume of soil changes dramatically. There are a variety of other theories that might be offered. The raising of soil by the bucket was most likely caused by a Unity constraint that was not correctly implemented. Unity game engine development should be more realistically applied in the future to compensate for these flaws.
Table 4.
soil-bucket 2D simulation with high λ conditions
| Lene’ parameters | Penetration | Scoop | |
| 𝜇=5 | 𝜆=10 |  | 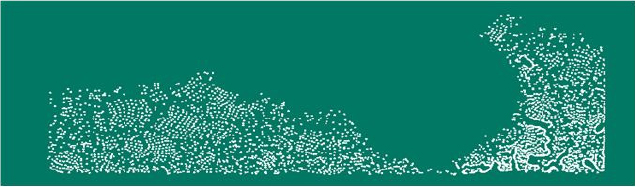 |
| 𝜆=100 | 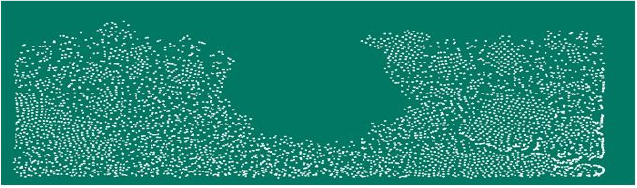 | 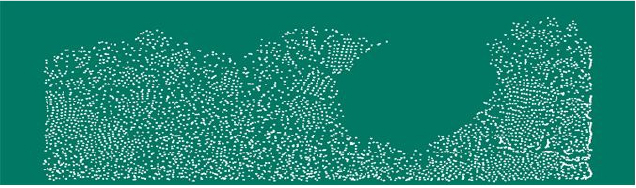 | |
While existing studies used an analytical method such as DEM and FEM, the result of this study is the first study to simulate construction equipment work and establish a work plan by applying a new technique called MPM. The difference between MPM techniques and DEM and FEM is that it is easier to obtain results with particle simulation tools already made.
However, while existing studies can take into account the force applied to soil, this study has a clear limitation in that it performed a simulation of pushing up soil with a very simple circular bucket. In addition, it did not take into account the fact that the result value changes very sensitively to the initial state of soil. Therefore, this study applied the MPM technique to soil-bucket simulation, but it can be seen that many improvements are needed in the future.
Conclusions
Earthwork is the first step in any construction project, and precision and efficiency are critical. Excavation automation may not be far off, given that repetitive and relatively easy tasks are more likely to succeed in automation. However, the fact that this study includes precise plans for excavating soil is essential, as many studies provide plans that do not take excavation into account, such as robot driving and coverage path planning. This study looked at two major aspects. The first is the first attempt at research using MPM, a cutting-edge soil behavior simulation technique. Rather than using typical ways to replicate traditional soil mechanical procedures, this research used the Lagrangian method to simulate more realistic soil behavior. The second was to use game engines to implement physical behavior for more realistic simulation model verification. The results of the two-dimensional simulation are predicted to be similar to the facts and will be useful in future simulations of construction equipment such as graders, rollers, dump trucks, and so on.
Despite these attempts, the limitations of this study are also evident. There were no specific approaches for determining the best simulation parameters offered. The appearance of the excavation plane changes substantially depending on the type of the soil, the angle of incidence of the bucket, the depth of excavation, the distance of excavation, and the angle of excavation. This is due to the difficulty in determining if the simulation findings of soil applied with MPM approaches accurately reflect Ground Truth. In future studies, even if MPM techniques are introduced, studies on the suitability of soil behavior will also need to be referenced. Also, there is a slight lack of connectivity with research on bucket movements. It is expected that more accurate research results will be produced if the angle, direction, and depth of soil can be simulated by modifying the angle, direction, and depth of soil while excavating the soil in the future.
